
Antweight / Call 4B3
Call 4B3
Overview
Design
Update History
Iterations
v0.00.00 - (8/22/25)
v0.01.00 - (8/26/25)
v0.01.01 - (8/29/25)
v0.02.00 - (9/1/25)
v0.03.00 - (9/2/25)
v0.03.01 - (9/4/25)
v0.04.00 - (9/5/25)
v0.04.01 - (9/12/25)
v0.04.02 - (9/16/25)
v0.04.03 - (9/18/25)
v0.04.04 - (9/19/25)
v0.04.05 - (10/11/25)
v0.05.00 - (10/22/25)
v0.05.01 - (10/24/25)
v0.05.02 - (11/5/25)
v0.05.03 - (11/7/25)
v0.05.04 - (11/11/25)
v0.05.05 - (11/13/25)
v0.05.06 - (11/18/25)
v0.05.07 - (11/20/25)
v0.05.08 - (11/21/25)
- Antweight: Call 4B3 -
CALL 4B3

STATISTICS
Weight : 1.49 lb / 1.75 lb (676.1g / 453.6g + 113.4g + 226.8g (793.8g))
Dimensions (L-W-H) : ___ in x ___ in x ___ in
Weapon Type : Ring Spinner
Drive Type : Shuffler
Control Type : Unconventional (Reality Quest PS1 Glove)
Top Speed : [_____]
Turn Speed : [_____]
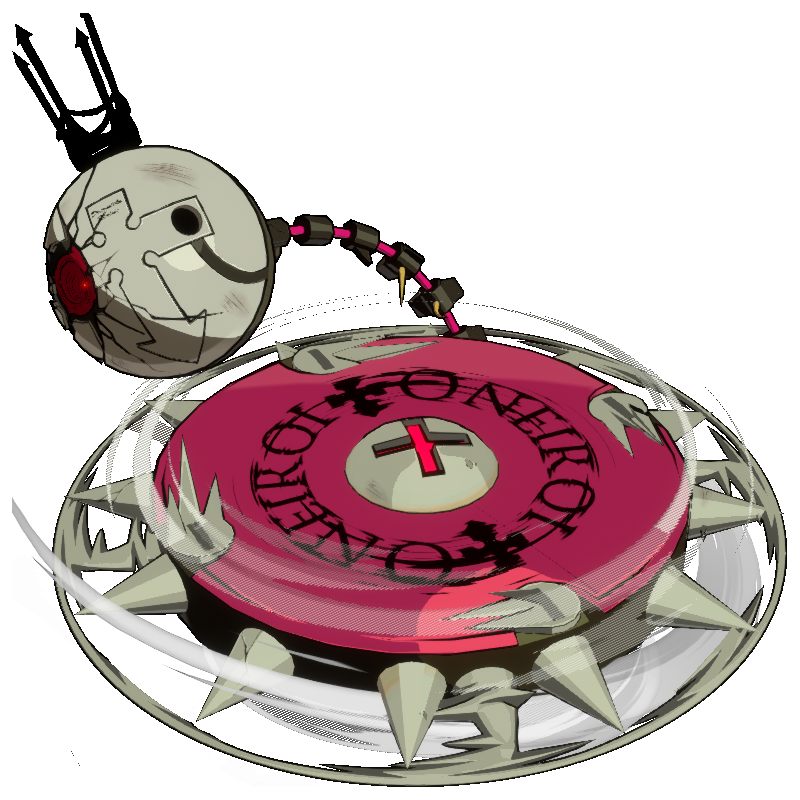
Call 4B3 is a heavyweight ring-spinner that uses its extra weight bonuses to decimate the competition.DESIGN OVERVIEW
[Overview]
- Update History -
Iterations
Version
Description
Date
--------------------
--- Early Conceptualization ---------------------------------------------------------
8/22/25
Drive Type Change : Bristle -> Shuffler
8/26/25
Control Type Determined : Unconventional (Reality Quest PS1 Glove)
8/29/25
Weapon Type Change : Ring Spinner -> Shell Spinner
9/1/25
Weapon Type Change : Shell Spinner -> Ring Spinner; Started Modeling
9/2/25
Modeling Progress
9/4/25
New Plans / Roadmap
9/5/25
Significant Progress
9/12/25
Ball Bearing Holders
9/16/25
More Ball Bearing Holders
9/18/25
Shufflers!
9/19/25
Top Plate
10/11/25
Lower Body / Walls / Cover
10/22/25
Weight Improvements / Controller Materials
10/24/25
Controller Programming Done!
11/5/25
Within Weight Limit
11/7/25
Manufacturing Start / Reciever Pains
11/11/25
Remaining Electronics Ordered
11/13/25
Going Insane (Reciever Stuff)
11/18/25
Soldering Start / New Reciever Plan / Deadline Approaching
11/20/25
Finishing Everything
11/21/25
--------------------
--- Reflections ---------------------------------------------------------------------
11/22/25
v0.00.00 -- (8/22/25)
 Inspiration
Inspiration
Summery : Early Conceptualization
With this robot, I want to fullfill four specific design goals:
As for the ability thing? No idea yet.
Currently I want to make it use bristles as movement tools, similar to a hex bug.
For control I am currently undecided, but I know I want it to be WEIRD. Something nobody has ever even tried before.
- Visually resemble Bedman / Bedman? in terms of weapon / colors.
- Somehow resemble Bedman / Bedman? mechanically, through either ability or control.
- Use an unconventional movement method for an extra weight bonus.
- Use an unconventional control method for an extra weight bonus.
As for the ability thing? No idea yet.
Currently I want to make it use bristles as movement tools, similar to a hex bug.
For control I am currently undecided, but I know I want it to be WEIRD. Something nobody has ever even tried before.
v0.01.00 -- (8/26/25)
 Bristles
Bristles
 Shuffler
Shuffler
Summery : Drive Type Change : Bristle -> Shuffler
After speaking to others who have attempted to work with ring spinners, bristles are probably not a workable option for movement. Instead, I am swapping to a shuffler design. It should also just be easier to get working in general.
v0.01.01 -- (8/29/25)
 Behold! Garbage!
Behold! Garbage!
Summery : Control Type Determined : Unconventional (Reality Quest PS1 Glove)
Today I wanted to satisfy the mechanical similarity as well as control. Obviously I can't add hovering or Deja Vu or timed explosives or anything. So instead, I am attempting to invoke the spirit of Bedman, specifically as he is in Strive's story. To do this, I am utilizing a few different fan theories:
To accomplish this, I am going to use a controller that not only mimics the puppet concept, but also barely functions in the first place: the Reality Quest Glove controller for the Playstation 1. It fits everything I want perfectly.
- Romeo's Soul Controls Bedman? - Not true, but lays the foundation for other things.
- Romeo Literally Puppets The Bedframe - A fun idea I have seen a few times.
- The Afterlife Has Terrible Internet - The connection to the bedframe is laggy and annoying.
To accomplish this, I am going to use a controller that not only mimics the puppet concept, but also barely functions in the first place: the Reality Quest Glove controller for the Playstation 1. It fits everything I want perfectly.
v0.02.00 -- (9/1/25)
 Ring Spinner
Ring Spinner
 Shell Spinner
Shell Spinner
Summery : Weapon Type Change : Ring Spinner -> Shell Spinner
After thinking it over, I decided to change the weapon to a shell spinner. It is much easier to make as a beginner, and will be easier to create in my very small time frame.
v0.03.00 -- (9/2/25)
 Beginnings
Beginnings
Summery : Weapon Type Change : Shell Spinner -> Ring Spinner
I have once again changed my mind. I think it is possible to make a successful ring.
I have also started modeling in fusion!
I have also started modeling in fusion!
v0.03.01 -- (9/4/25)
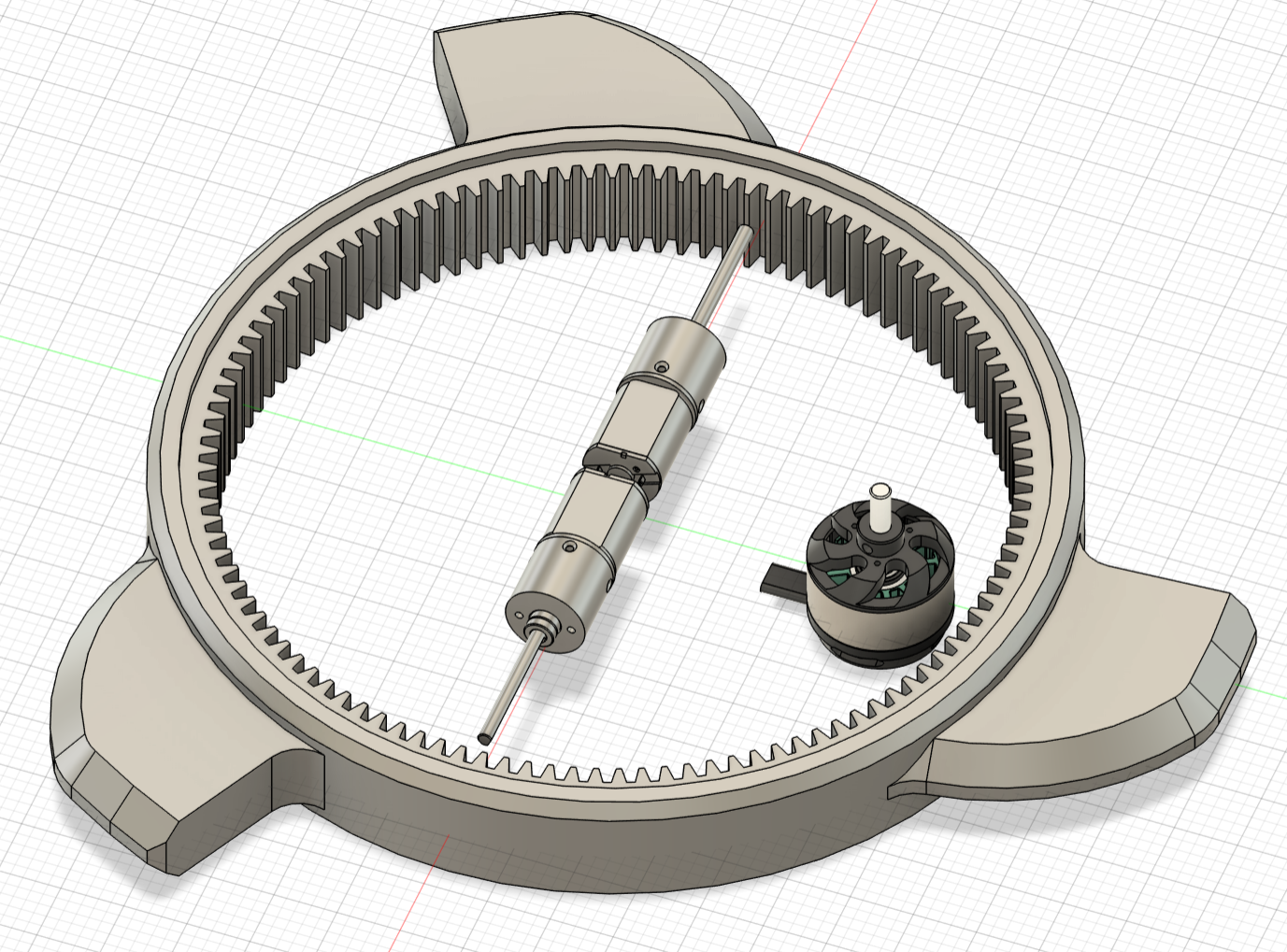 Motors in Place!
Motors in Place!
Modeling Progress
I have made more progress. The diameter of the entire ring has expanded, allowing the motors to fit properly.
v0.04.00 -- (9/5/25)
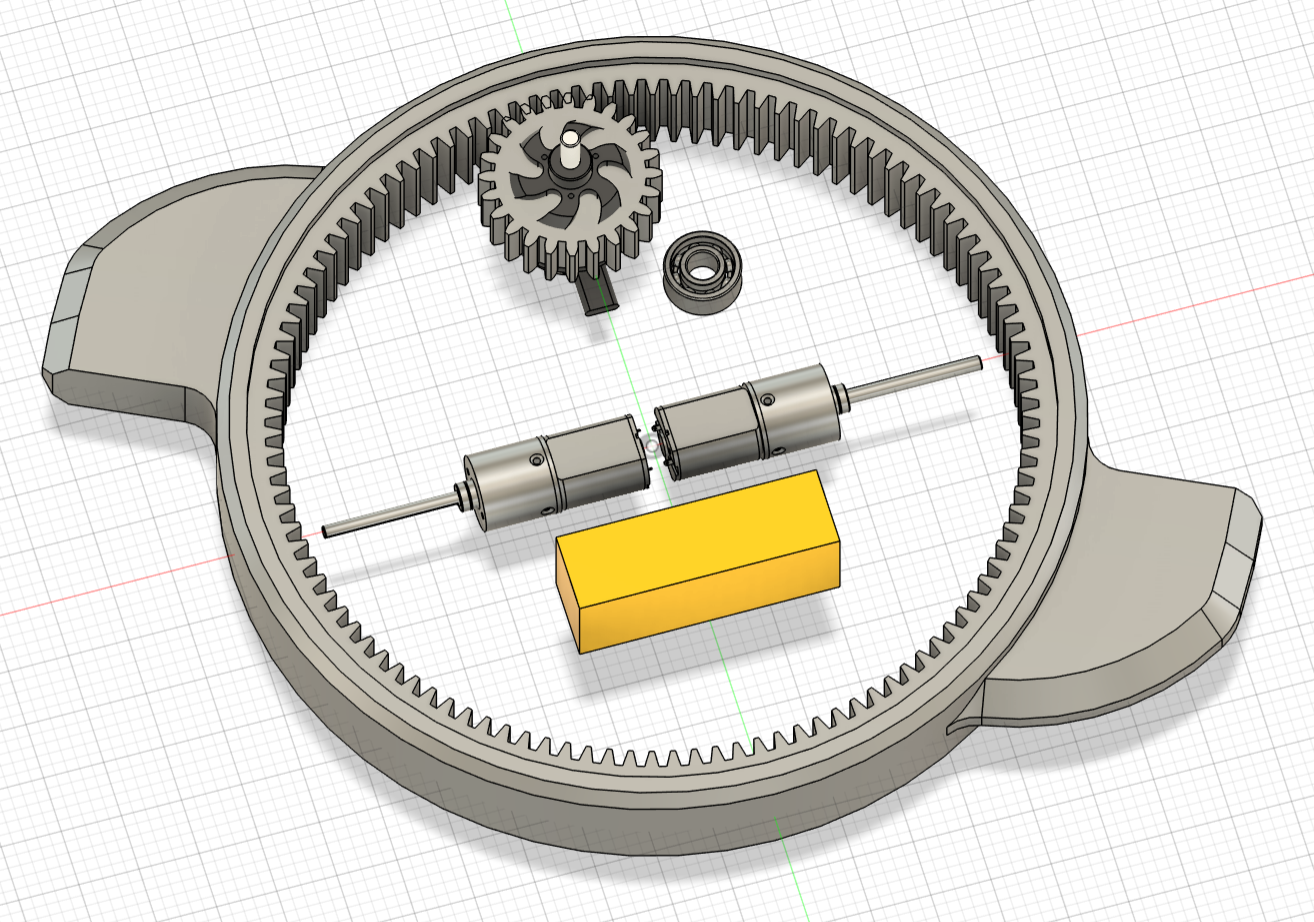 Final version before all the new changes...
Final version before all the new changes... (though I already removed a weapon tooth).
New Plans / Roadmap
A bit of progress has been made, most notable by adding a weapon gear and decreasing the number of weapons.
More importantly, I got a large amount of advice on the following aspects:
So these are what I will focus on for the near future.
More importantly, I got a large amount of advice on the following aspects:
- Bearing placement / design (horizontal and vertical)
- Gear Generation
- General stability / weight distribution
- Common issues
So these are what I will focus on for the near future.
v0.04.01 -- (9/12/25)
 Progress!
Progress!
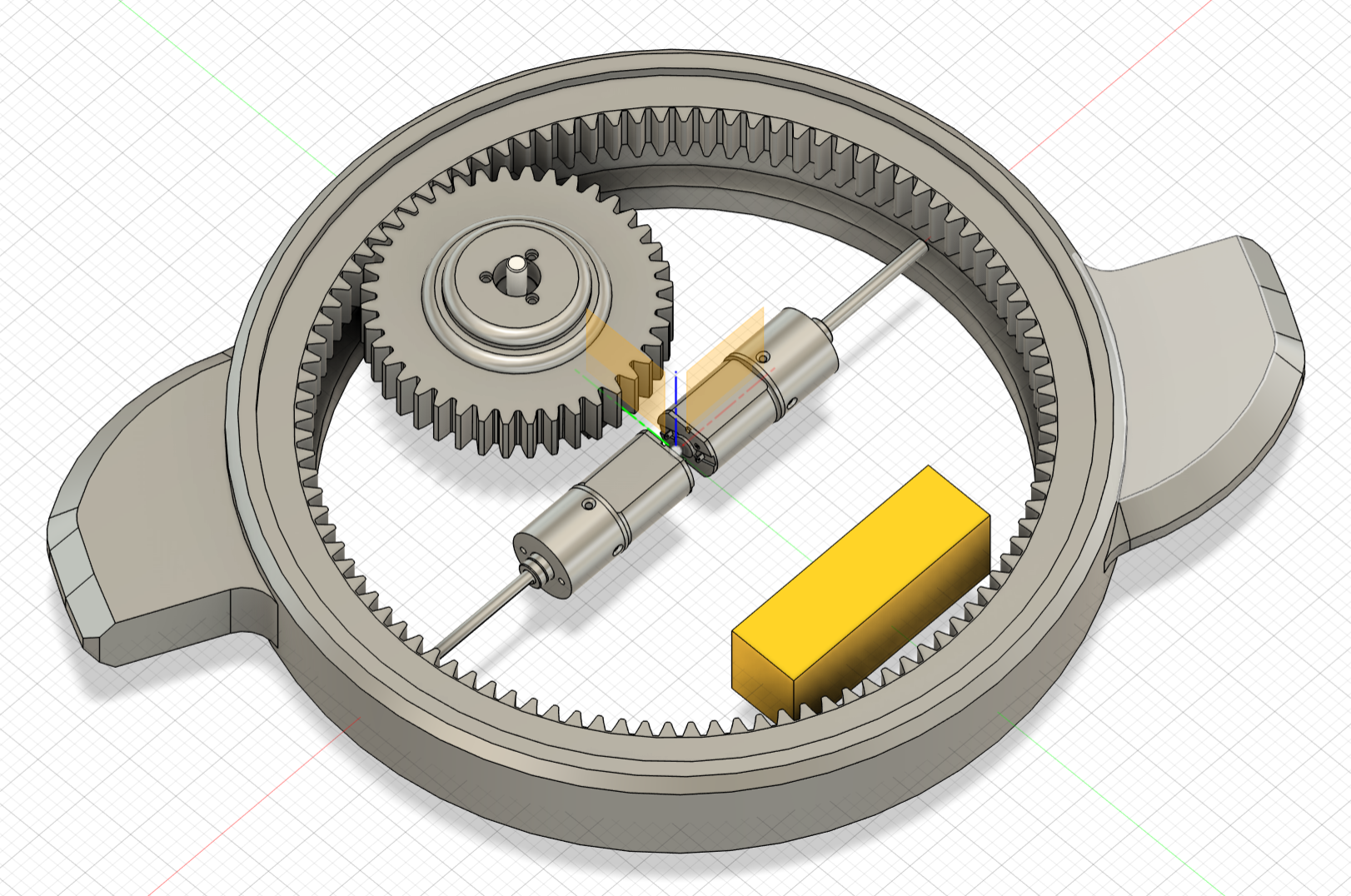
Summery : Significant Progress
A lot of things have changed. I completely reworked the gears on both sizes, and started work on the ball bearing holders. I also made it so the gear connects to the motor.
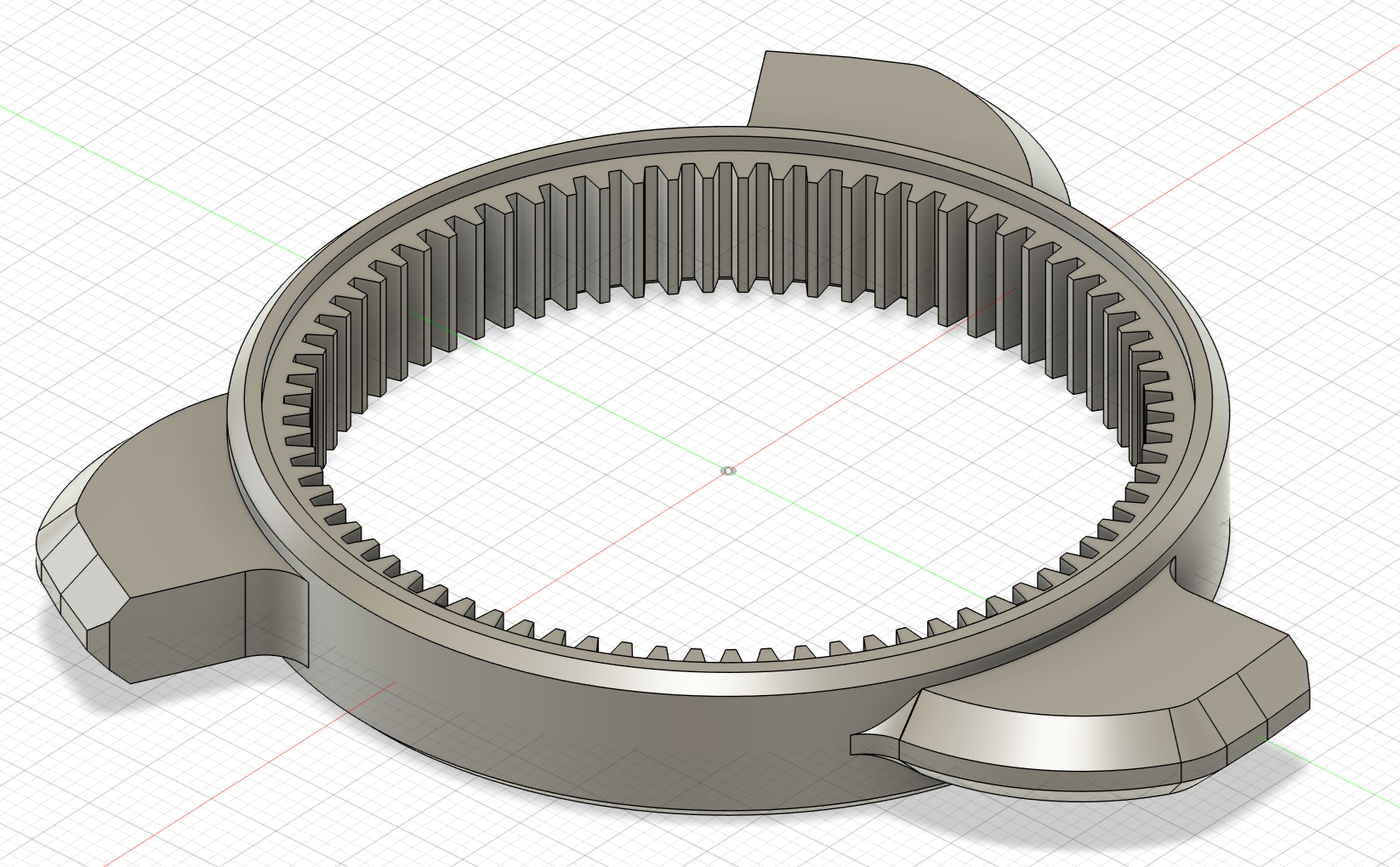
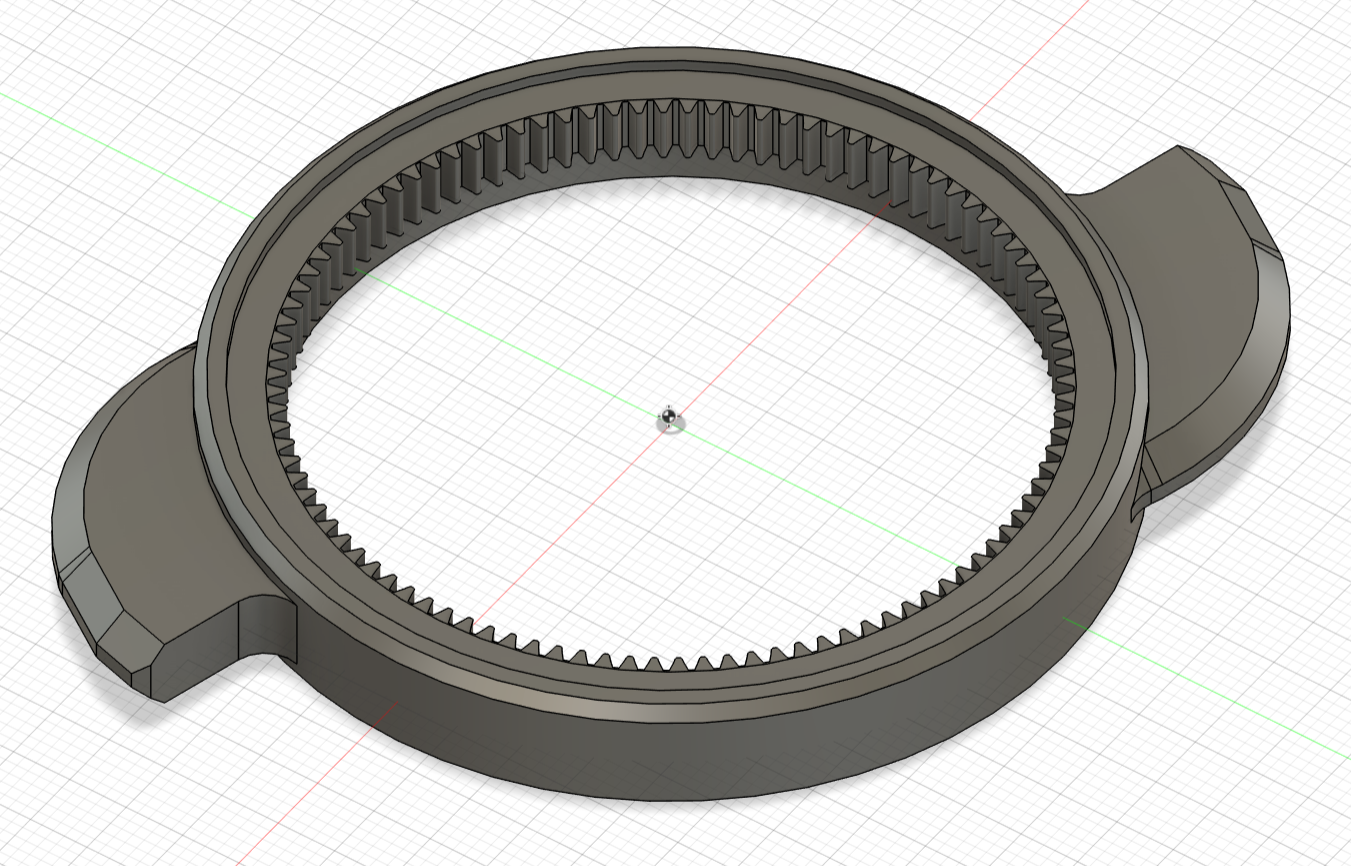
v0.04.02 -- (9/16/25)
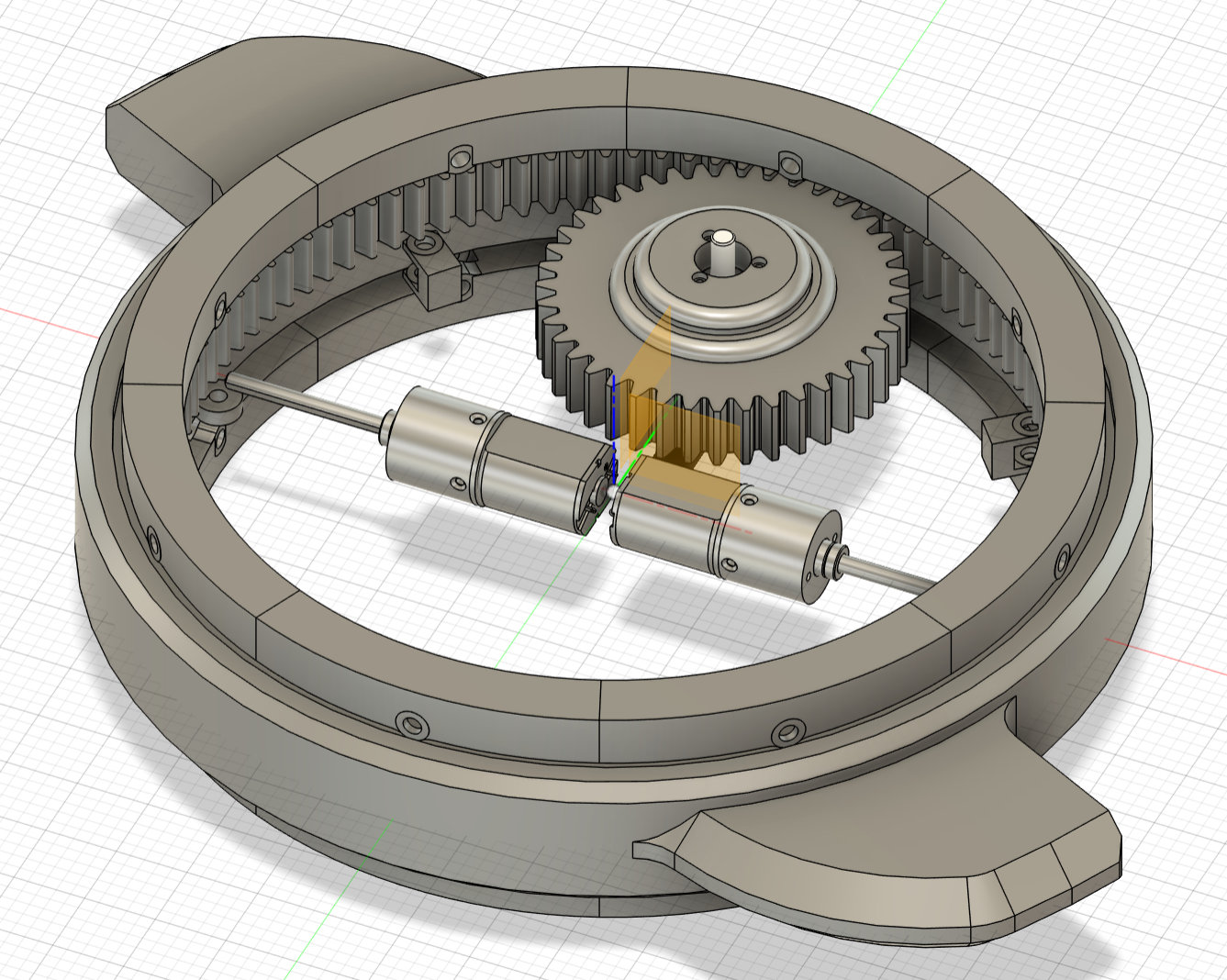
 (Ring hidden to show lower area)
(Ring hidden to show lower area)
Summery : Ball Bearing Holders
I finally modeled to holders for the lower ball bearings. These will then be flipped up to the top at a later point.
v0.04.03 -- (9/18/25)
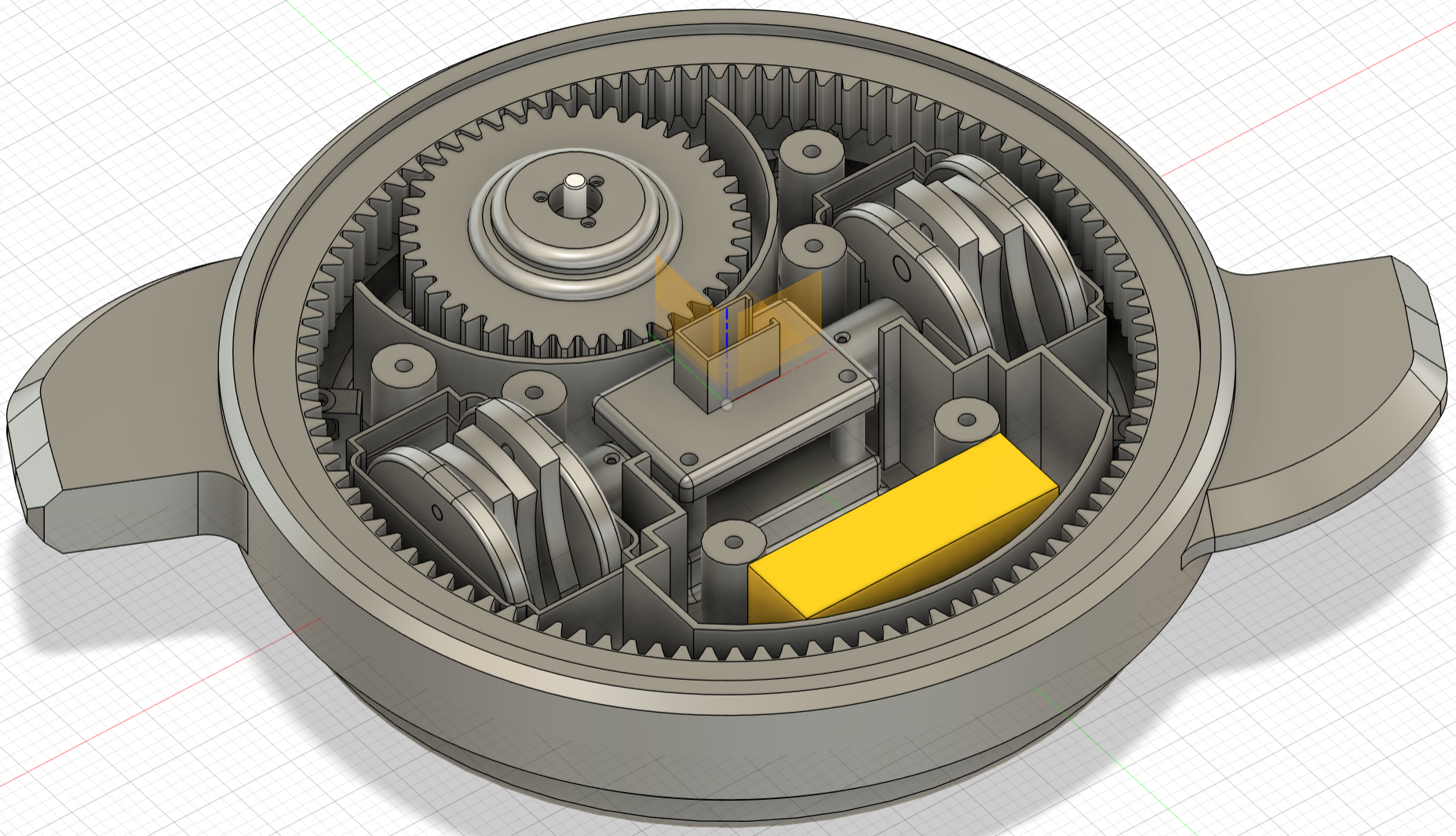
 It feels more complete now, despite the minimal changes
It feels more complete now, despite the minimal changes
Summery : More Ball Bearing Holders
The upper ball bearings are now in, as well as the horizontal ones. The next order of buisiness is the shuffler mechanism. Which I definitely am not trying to avoid modeling.
v0.04.04 -- (9/19/25)
 -----
-----
Summery : Shufflers!
i have made shufflers!!!!!!!!!!!!!!!!!!!!!!!! They seem like they would work quite well.
v0.04.05 -- (10/11/25)
 -----
-----
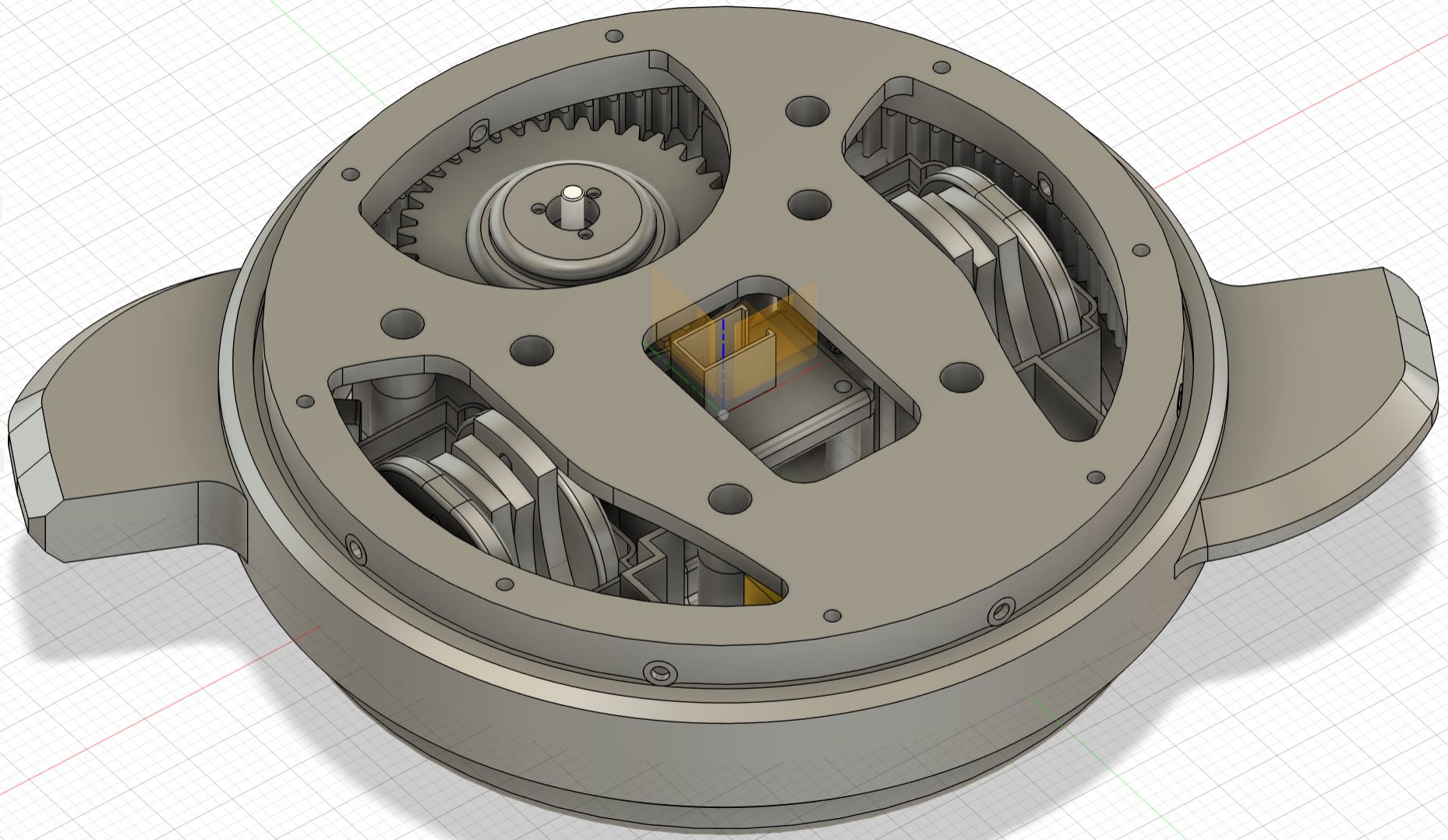
Summery : Top Plate
It's been a while.
I made a top plate for the robot. So all that is left is the bottom plate and motor clamps, and then it is basically done (besides all of the programming and stuff).
I made a top plate for the robot. So all that is left is the bottom plate and motor clamps, and then it is basically done (besides all of the programming and stuff).
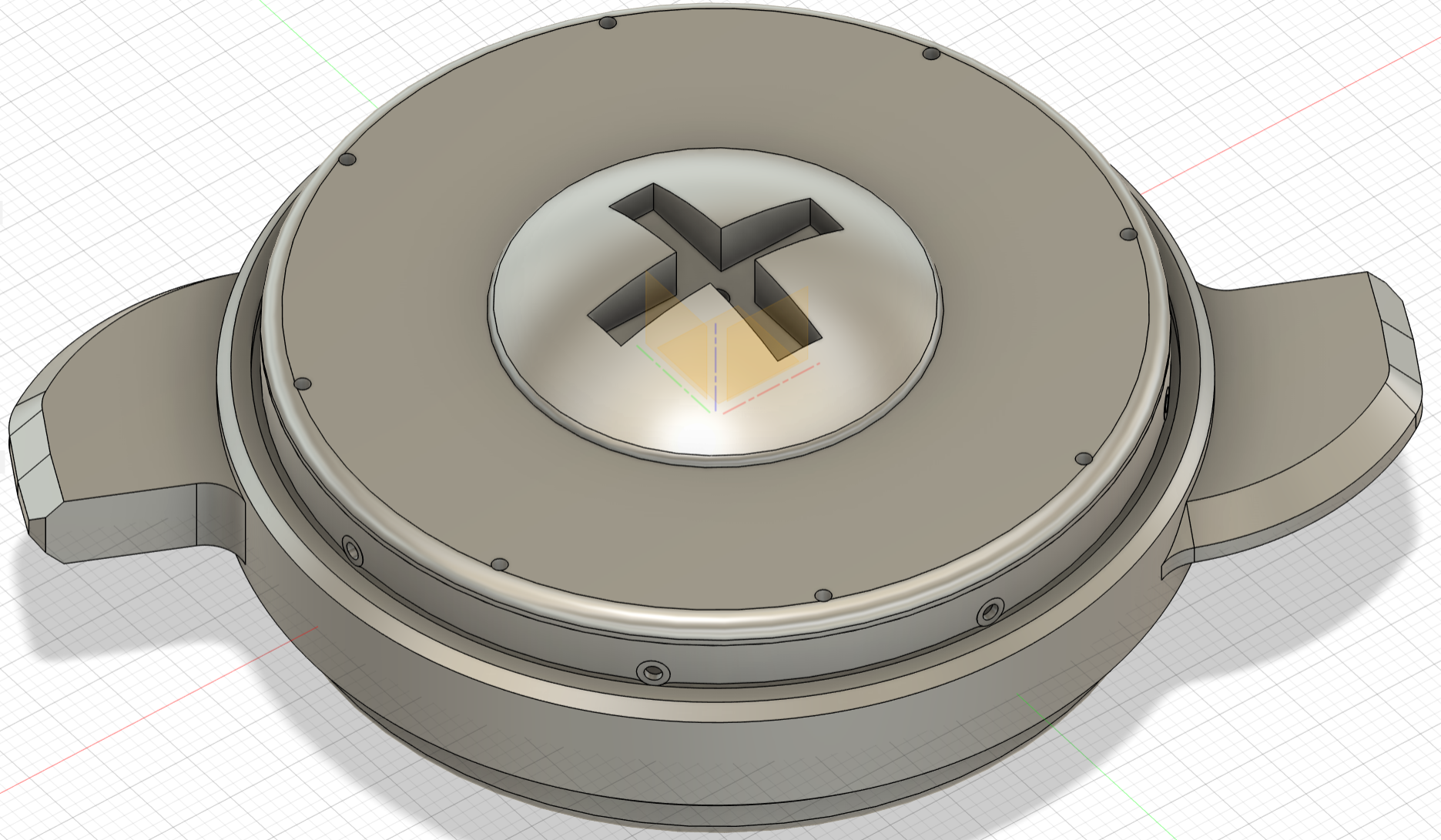
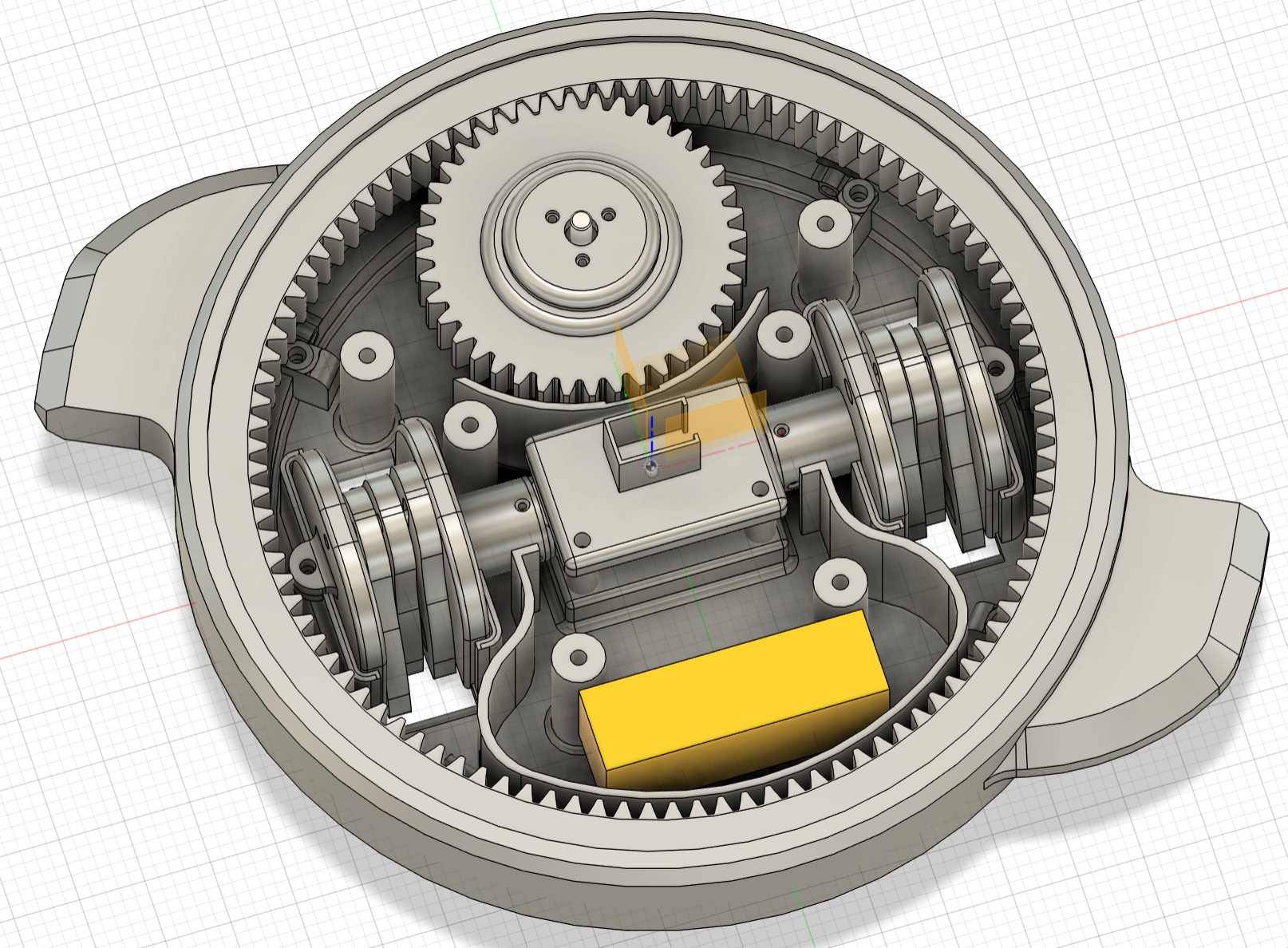
v0.05.00 -- (10/22/25)
 Top Removed
Top Removed
 Cover Removed
Cover Removed
 Full
Full
Summery : Lower Body / Walls / Cover
The entire robot is now feature complete!
...but is also 93g overweight. So besides fixing that, the only thing to do now is print it and program the controller.
...but is also 93g overweight. So besides fixing that, the only thing to do now is print it and program the controller.
v0.05.01 -- (10/24/25)
 Top Removed
Top Removed
Summery : Weight Improvements / Controller Materials
With a few small redesigns, the extra weight has been brought down to only 21g.
I have also ordered the parts I will need to program the controller. I am primarily following this tutorial : https://learn.adafruit.com/playstation-spinner-controller/wire-the-playstation-controller
I have also ordered the parts I will need to program the controller. I am primarily following this tutorial : https://learn.adafruit.com/playstation-spinner-controller/wire-the-playstation-controller
v0.05.02 -- (11/4/25)
[image]
Summery : Controller Programming Done!
The controller now outputs to my computer's keyboard! The only barrier on the technology side will now be the transmitter / reciever.
v0.05.03 -- (11/7/25)
 [image]
[image]
Summery : Within Weight Limit
The robot is now within the weight limit, with only 0.276g to spare.
v0.05.04 -- (11/11/25)
 the final version!
the final version!
Summery : Manufacturing Start / Reciever Pains
I've done some last minute changes to the model, which is now fully complete.
All of the parts needed to build the robot are now on the way. Tomorrow I will start the 3D printing process. The real pain point now is the reciever, which is probably very annoying to set up.
All of the parts needed to build the robot are now on the way. Tomorrow I will start the 3D printing process. The real pain point now is the reciever, which is probably very annoying to set up.
v0.05.05 -- (11/13/25)

Summery : Remaining Electronics Ordered
All of the electronics have been ordered. I will be using an esp32 to make control work. I don't know how to program it yet, but I will try.
v0.05.06 -- (11/18/25)
Summery : Going Insane (Reciever Stuff)
I have been working on and off on this receiver thing. The problem is that I have a hyper-specific use case, as I need the esp32 to recieve keyboard inputs over bluetooth from my laptop. But all the internet ever gives me is tutorials on how to make a custom bluetooth keyboard.
v0.05.07 -- (11/20/25)

Summery : Soldering Start / New Reciever Plan / Deadline Approaching
I started soldering, and it should be done tomorrow. The reciever is now utilizing WIFI instead of bluetooth, which I am currenly having greater success with. This entire project needs to be complete by 11/22 at around 8:00 AM... I'm not sure if I will make it.
v0.05.08 -- (11/21/25)
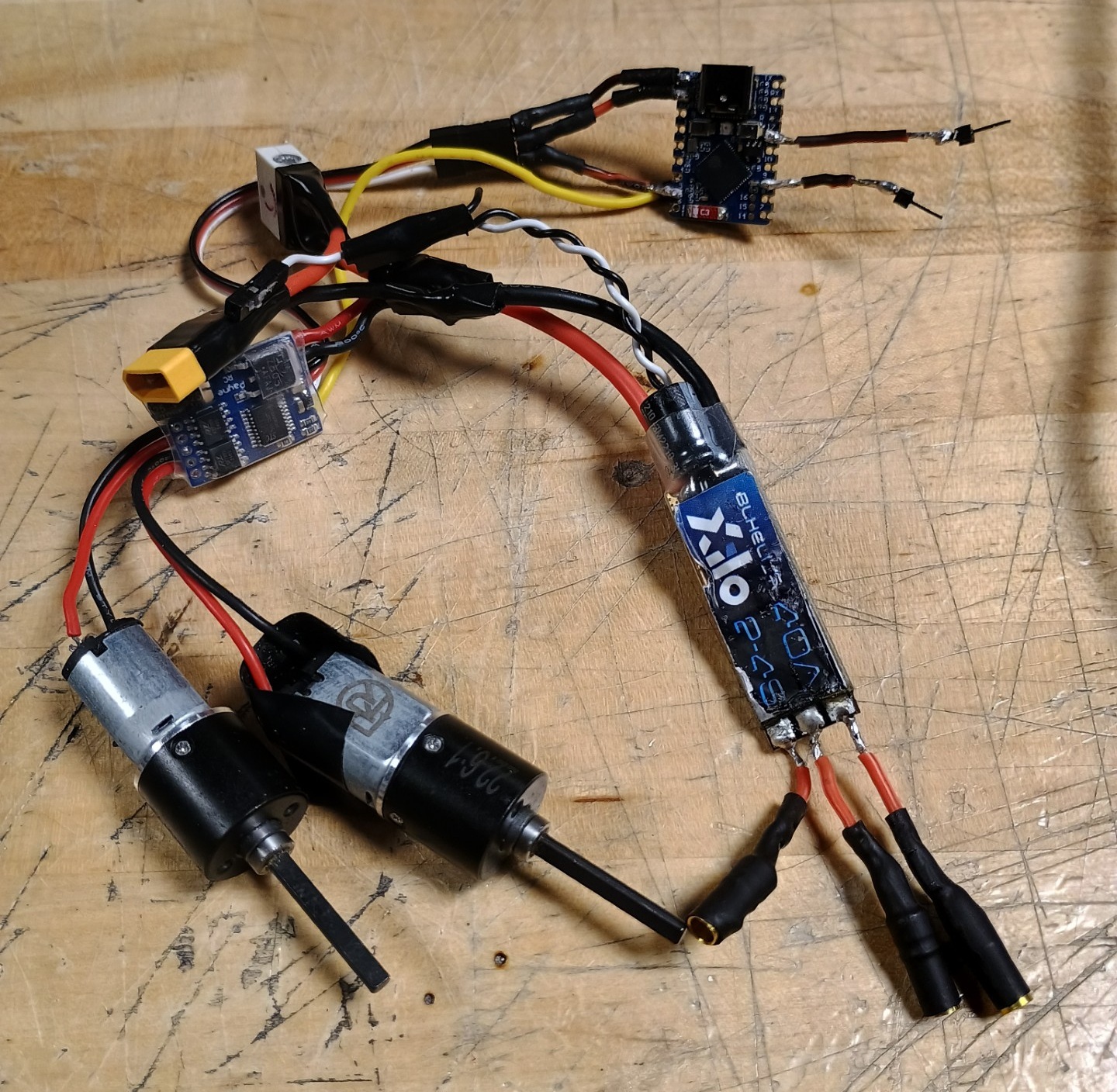 Soldering
Soldering
 New Weapon
New Weapon
Summery : Finishing Everything
This marks the final 12 hours before the competition. My plan is to work on the robot until it is either completely done or the competition starts... I may not be sleeping today.
{8:00 PM} : Finishing up the soldering.
{10:17 PM} : Soldering is done! Now for general assembly.
{10:59 PM} : Assembly done! Incredibly, the robot ended up being 100g less than it was assumed to be... so I am making an even heavier weapon!
{11:32 PM} : The new weapon is complete. Now moving on to the programming...
{12:01 AM} : Complete disaster. Upon plugging in the battery, two of the most important electronics started smoking, destroying them entirely.
So... the end. The deadline was tomorrow, there is no way to get electronics in time.
{8:00 PM} : Finishing up the soldering.
{10:17 PM} : Soldering is done! Now for general assembly.
{10:59 PM} : Assembly done! Incredibly, the robot ended up being 100g less than it was assumed to be... so I am making an even heavier weapon!
{11:32 PM} : The new weapon is complete. Now moving on to the programming...
{12:01 AM} : Complete disaster. Upon plugging in the battery, two of the most important electronics started smoking, destroying them entirely.
So... the end. The deadline was tomorrow, there is no way to get electronics in time.
Summery : Reflections
This was the part of this page that was supposed to be for the final version of the robot, and seeing how it stacked up in the competition. But obviously that won't be happening.
So, what did I learn from this project?
Well, I was reminded of how shitty it is working hardware, a lesson I keep forgetting for some reason.
I did learn a small amount about ESP32s, which I could see coming in handy. Maybe. Probably not.
I am marginally better at CAD now? Maybe?
...or maybe it was all just a waste of my time. It was a cool project. I still really love the concept. But I should have known it wasn't something I was capable of.
Is there a chance I revisit this? Maybe. I can see a future where that happens. Very unlikely though. And for the immediete future my motivation is completely dead.
So, what did I learn from this project?
Well, I was reminded of how shitty it is working hardware, a lesson I keep forgetting for some reason.
I did learn a small amount about ESP32s, which I could see coming in handy. Maybe. Probably not.
I am marginally better at CAD now? Maybe?
...or maybe it was all just a waste of my time. It was a cool project. I still really love the concept. But I should have known it wasn't something I was capable of.
Is there a chance I revisit this? Maybe. I can see a future where that happens. Very unlikely though. And for the immediete future my motivation is completely dead.